Selected Publications
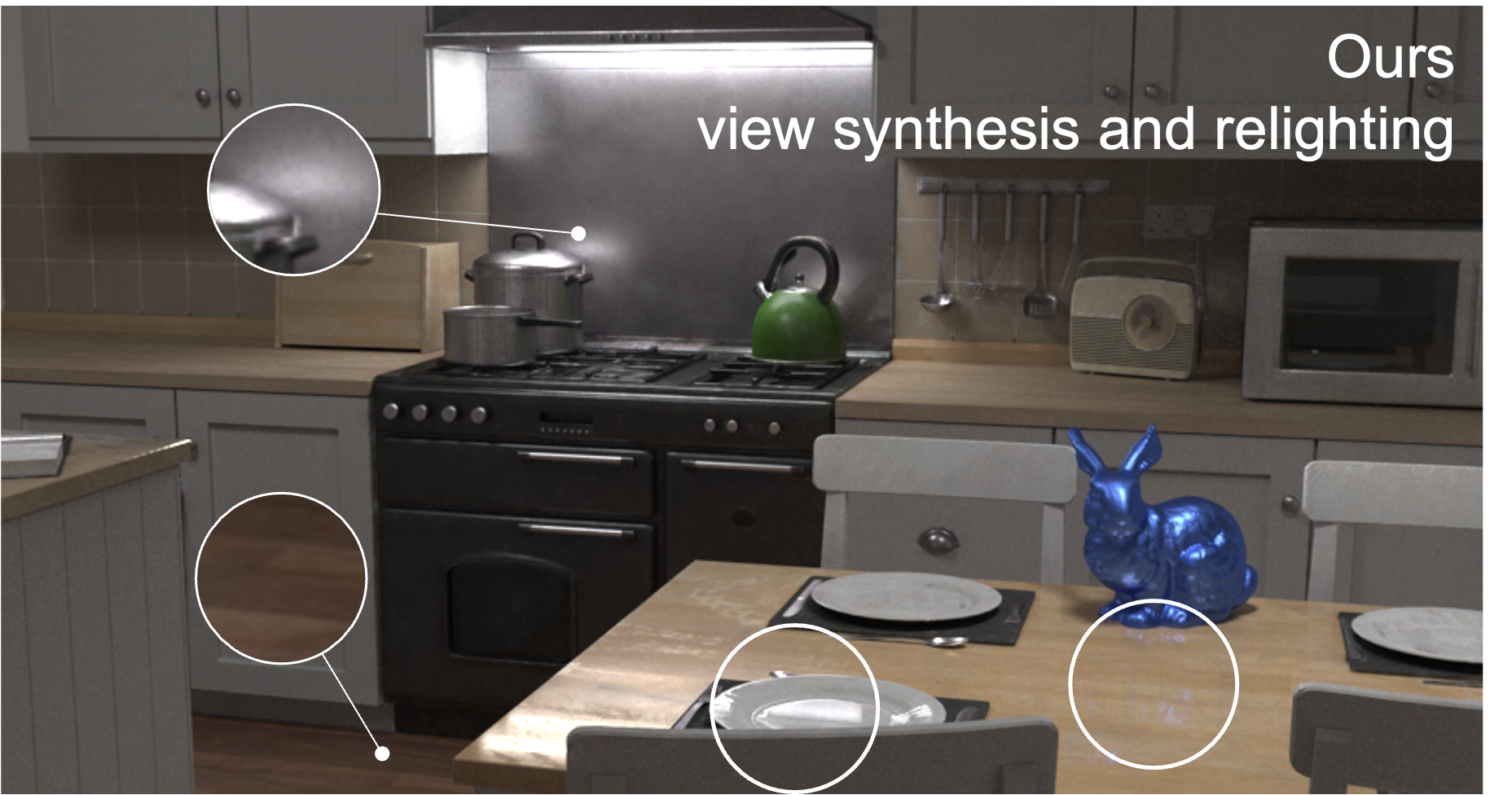
FIPT: Factorized Inverse Path Tracing for Efficient and Accurate Material-Lighting Estimation
Factorized Inverse Path Tracing (FIPT) reduces ambiguity and Monte Carlo variance in inverse rendering, yielding efficient and high quality BRDF-emission, appealing relighting, and object insertion results for inverse rendering of indoor scenes.
ICCV 2023 [Oral]

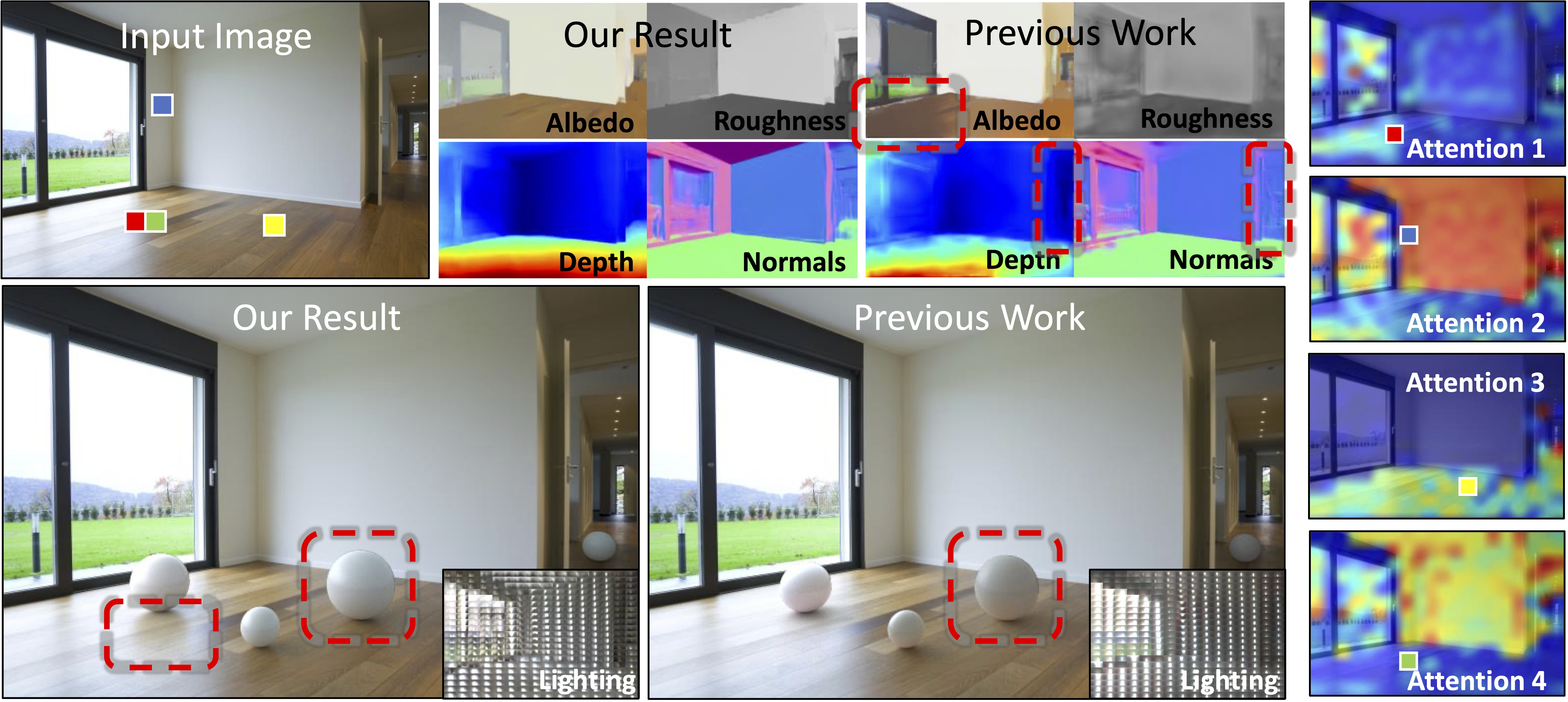
IRISformer: Dense Vision Transformers for Single-Image Inverse Rendering in Indoor Scenes
A state-of-the-art inverse rendering pipeline based on dense vision transformers, for simultaneously estimating depths, normals, spatially-varying albedo, roughness and lighting from a single image of an indoor scene.
CVPR 2022 [Oral]

PhotoScene: Photorealistic Material and Lighting Transfer for Indoor Scenes
A framework that takes input image(s) of a scene along with approximately aligned CAD geometry, and builds a photorealistic digital twin with high-quality materials and similar lighting.
CVPR 2022
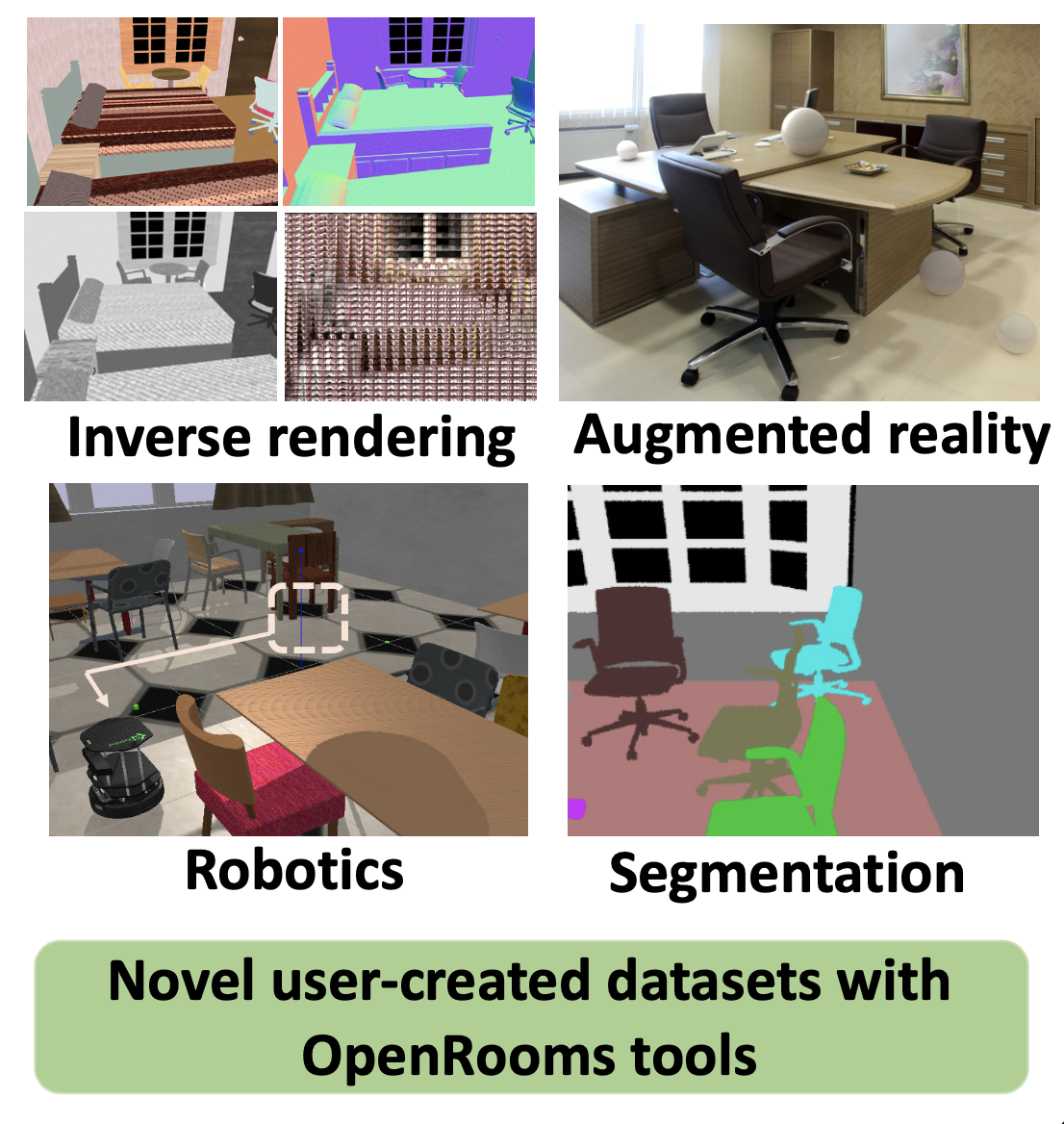
OpenRooms: An Open Framework for Photorealistic Indoor Scene Datasets
A novel framework for creating large-scale photorealistic datasets of indoor scenes, with ground truth geometry, material, lighting and semantics, as well as an open dataset and the dataset creation tools.
CVPR 2021 [Oral]
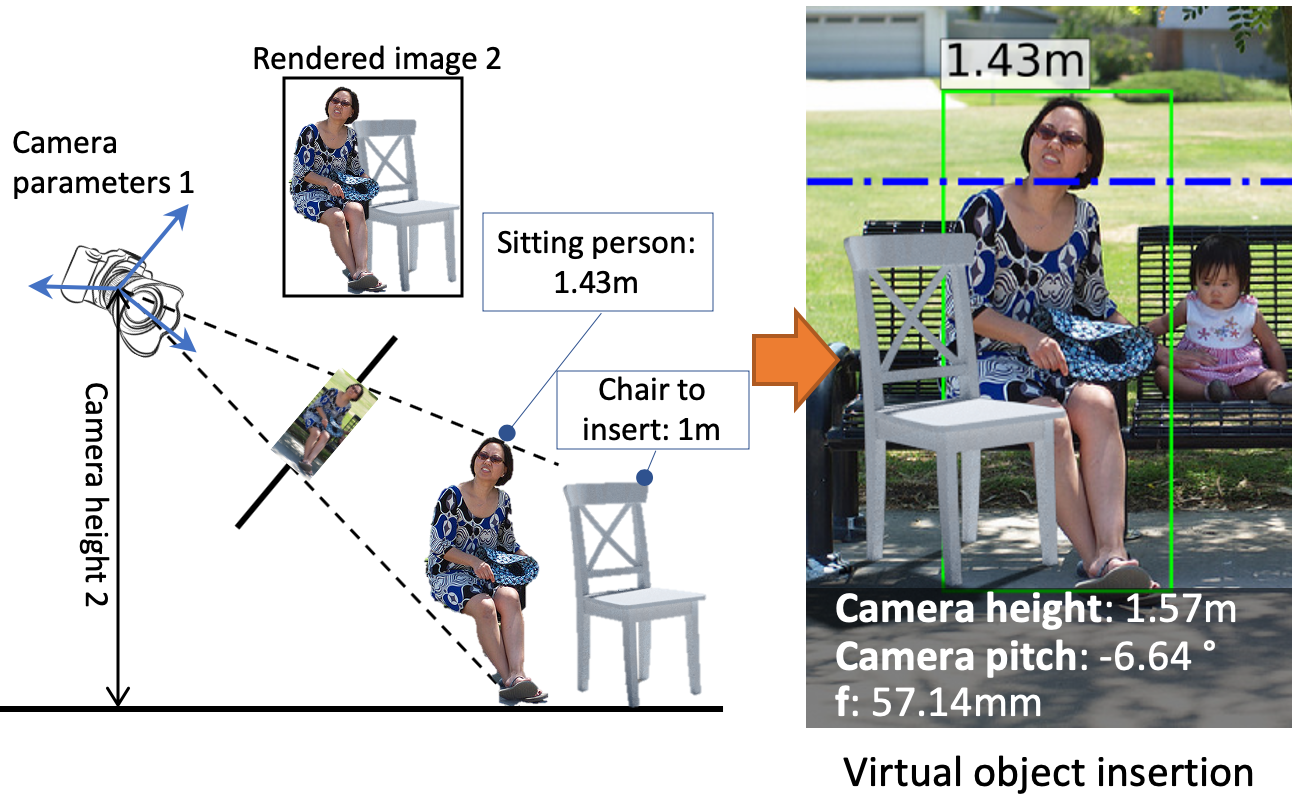
Single View Metrology in the Wild
We present a novel approach to single view metrology that can recover absolute 3D heights of objects and camera parameters, namely, orientation, field of view and the scale of the scene, using just a monocular image acquired in unconstrained conditions.
ECCV 2020
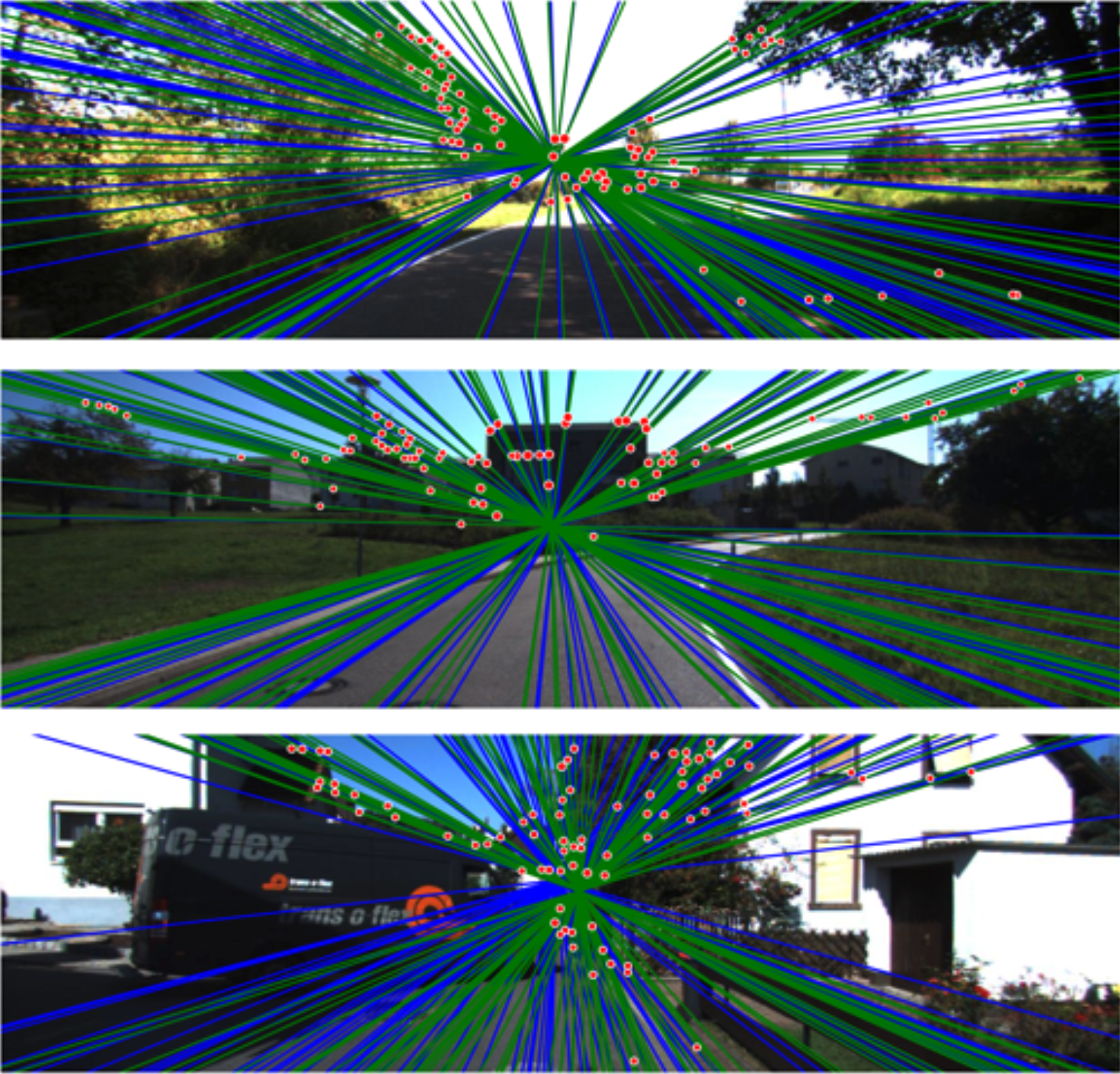
Deep Keypoint-Based Camera Pose Estimation with Geometric Constraints
We design an end-to-end trainable framework consisting of learnable modules for detection, feature extraction, matching and outlier rejection, while directly optimizing for the geometric pose objective.
IROS 2020
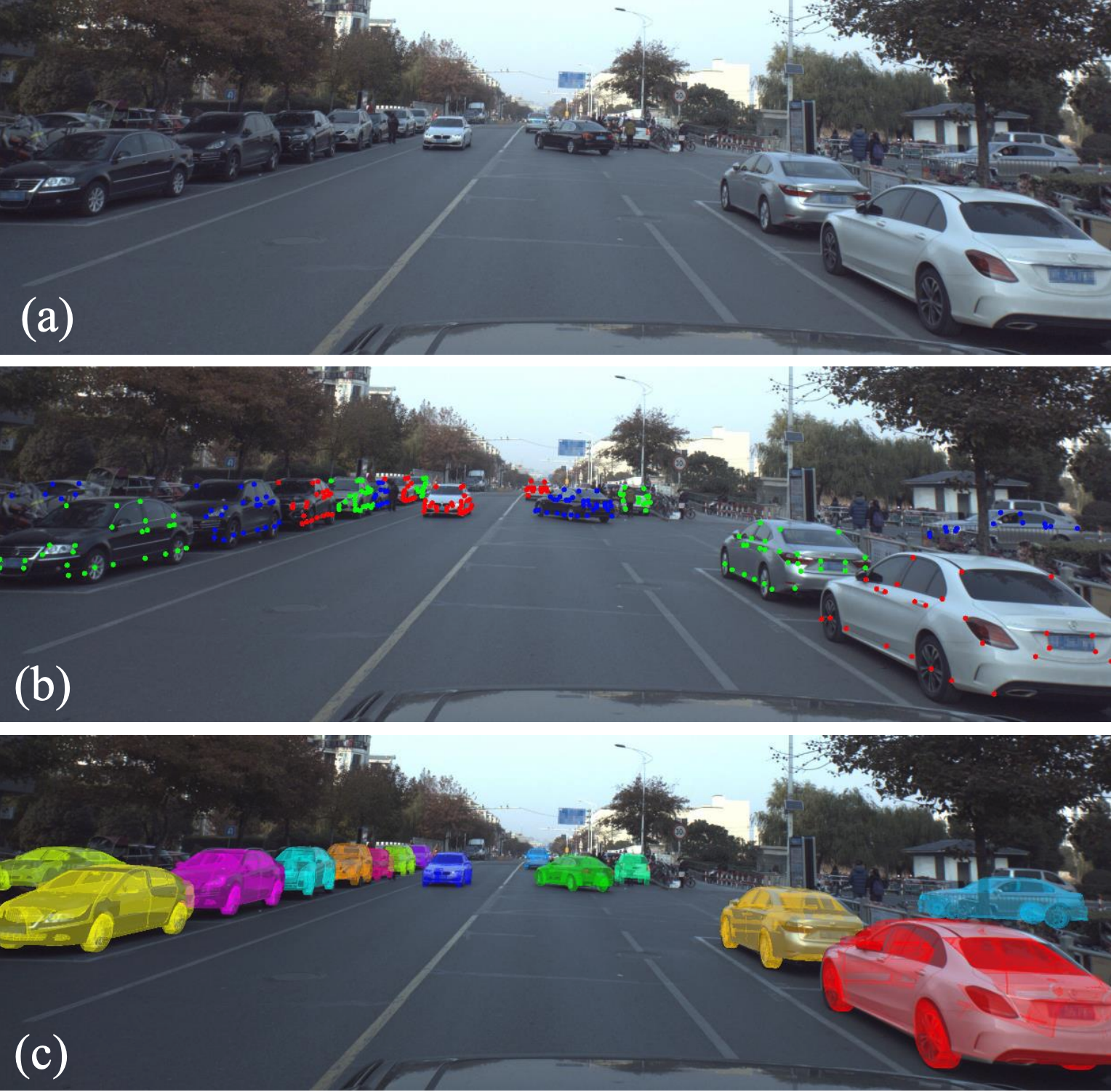
ApolloCar3D: A Large 3D Car Instance Understanding Benchmark for Autonomous Driving
The first large-scale database suitable for 3D car instance understanding, ApolloCar3D, collected by Baidu. The dataset contains 5,277 driving images and over 60K car instances, where each car is fitted with an industry-grade 3D CAD model with absolute model size and semantically labelled keypoints.
CVPR 2019
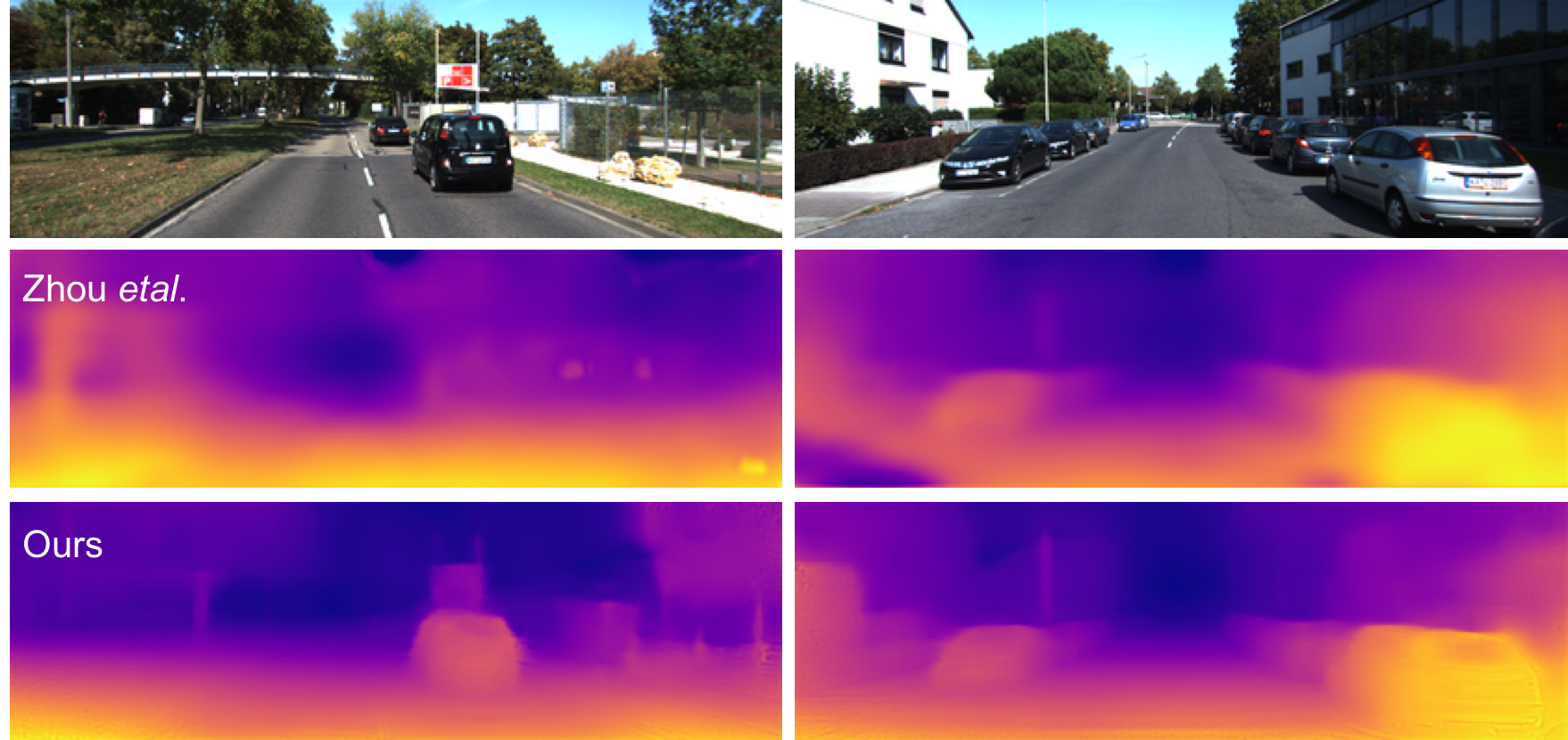
Learning Depth from Monocular Videos using Direct Methods
For learning single image depth predictor from monocular sequences, we show that the depth CNN predictor can be learned without a pose CNN predictor, by incorporating a differentiable implementation of DVO, along with a novel depth normalization strategy.
CVPR 2018
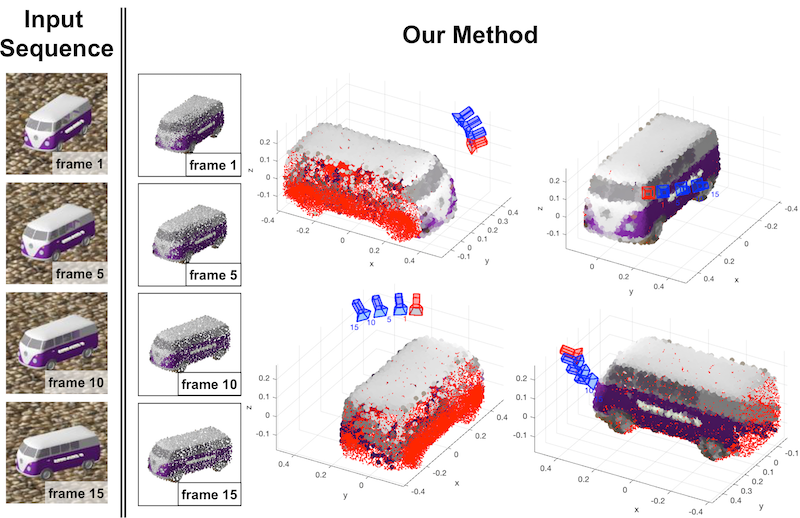
Object-Centric Photometric Bundle Adjustment with Deep Shape Prior
We introduce learned shape prior in the form of deep shape generators into Photometric Bundle Adjustment (PBA) and propose to accommodate full 3D shape generated by the shape prior within the optimization-based inference framework, demonstrating impressive results.
WACV 2018
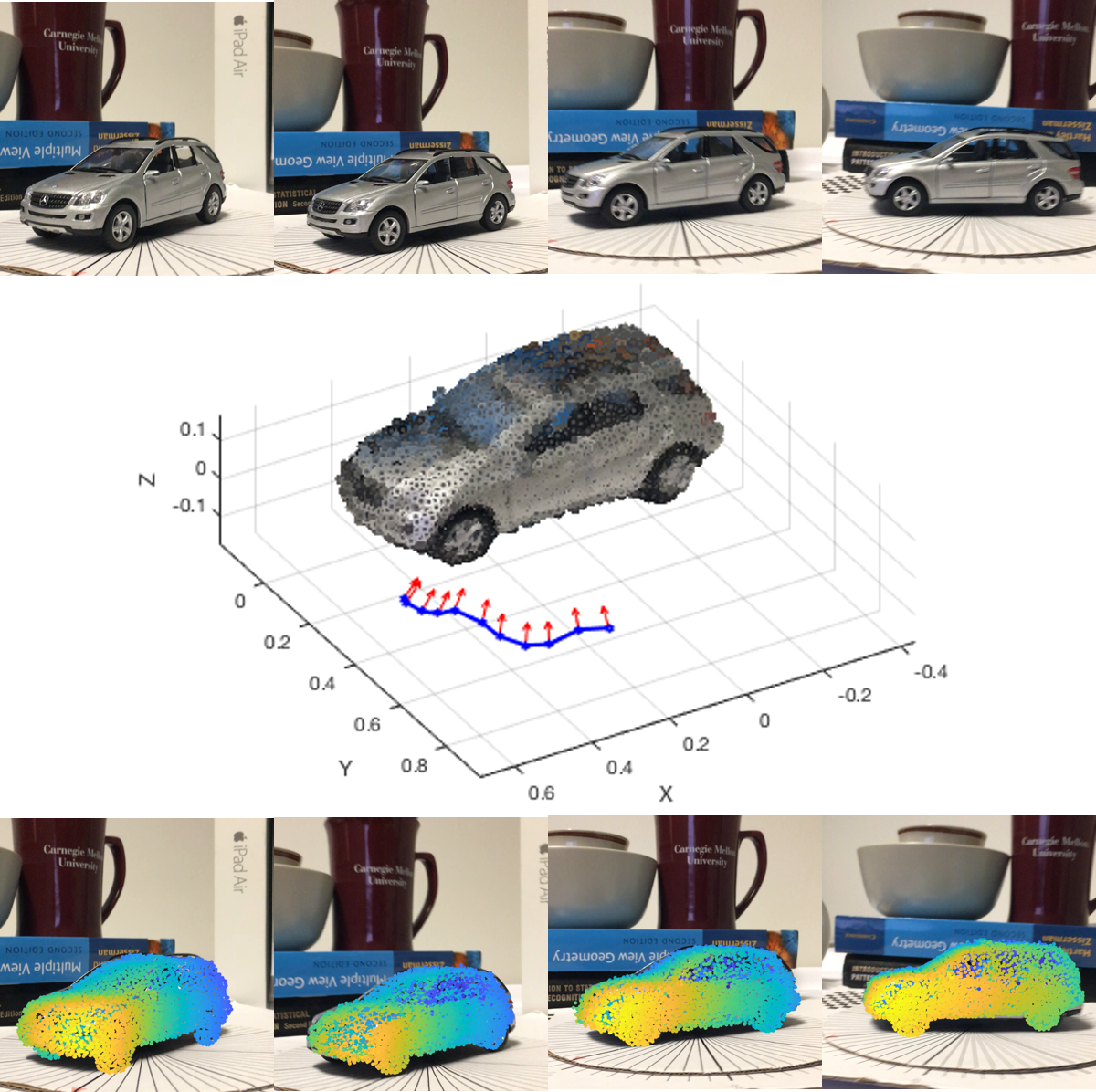
Semantic Photometric Bundle Adjustment on Natural Sequences
We provide the first approach of its kind (to our knowledge) for semantic object-centric PBA on natural sequences – which gives the global 6DoF camera poses of each frame and the dense 3D shape, with PBA-like accuracy but denser depth maps.
arXiv preprint, 2018
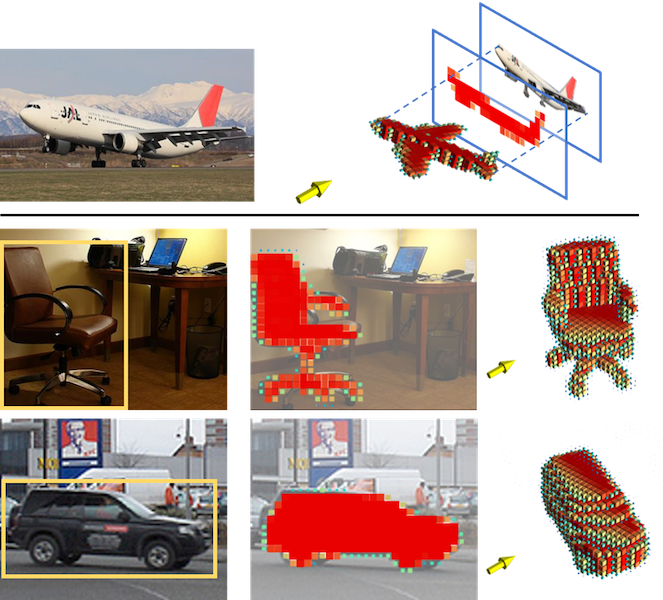
Rethinking Reprojection: Closing the Loop for Pose-aware Shape Reconstruction from a Single Image
In this paper we define the new task of pose-aware shape reconstruction from a single image, and we design architectures of pose-aware shape reconstruction using weak constraint from reprojecting the predicted shape back on to the image with the predicted pose.
ICCV 2017 [Spotlight]
